Letter from a reader:
Why Everyone Who Can Should Take the COVID-19 Vaccine
| revcom.us
Coronavirus disease 2019 (COVID-19) is spreading at an alarming rate across the country. The new Delta variant, one of many mutations of the original disease, is highly contagious, and it is infecting people especially those who have not been vaccinated. Right now, tens of thousands of people are hospitalized across the U.S., and hundreds are dying every day. Nearly all COVID-19 deaths are among people who have not been vaccinated—over 40 percent of people in this country who are eligible (over 12 years old) have not been fully vaccinated.
.jpg)
Highly magnified particles of the Coronavirus.
In the U.S., where the vaccine has been available to most eligible people, an important part of why people are not getting the vaccine is confusion, disinformation and misinformation, and a campaign of lies about the vaccine itself, how it works, and why it is important to take it. I felt this letter would be important in addressing the basic science involved, why everyone eligible should take it, and what are the stakes involved in whether people take it or not.
First, how does the vaccine work?
According to the World Health Organization:
Germs are all around us, both in our environment and in our bodies. When a person is susceptible and they encounter a harmful organism, it can lead to disease and death.
The body has many ways of defending itself against pathogens (disease-causing organisms). Skin, mucus, and cilia (microscopic hairs that move debris away from the lungs) all work as physical barriers to prevent pathogens from entering the body in the first place.
When a pathogen does infect the body, our body’s defences, called the immune system, are triggered and the pathogen is attacked and destroyed or overcome.1
When the pathogen is a disease-causing organism the body has never encountered before, it takes time for the immune system to recognize it, and to produce ways to defeat it. One of the most important parts of the body’s defenses are antibodies—large proteins that are able to recognize particular pathogens, and neutralize them so they cannot infect the body. There are thousands of antibodies for different diseases in a healthy adult.
Vaccines have been developed over hundreds of years, and have saved untold millions of lives. What vaccines do is provoke an antibody response—they train the body to recognize the pathogen and develop the antibodies to defeat it before the pathogen arrives. Some vaccines contain weakened or inactive parts of a pathogen which provoke the body to produce antibodies. Newer vaccines contain the “blueprint” for producing antibodies. Regardless of what kind of vaccine, it will not cause the disease in the person receiving the vaccine, but it will train the immune system to be able to mobilize against the disease.
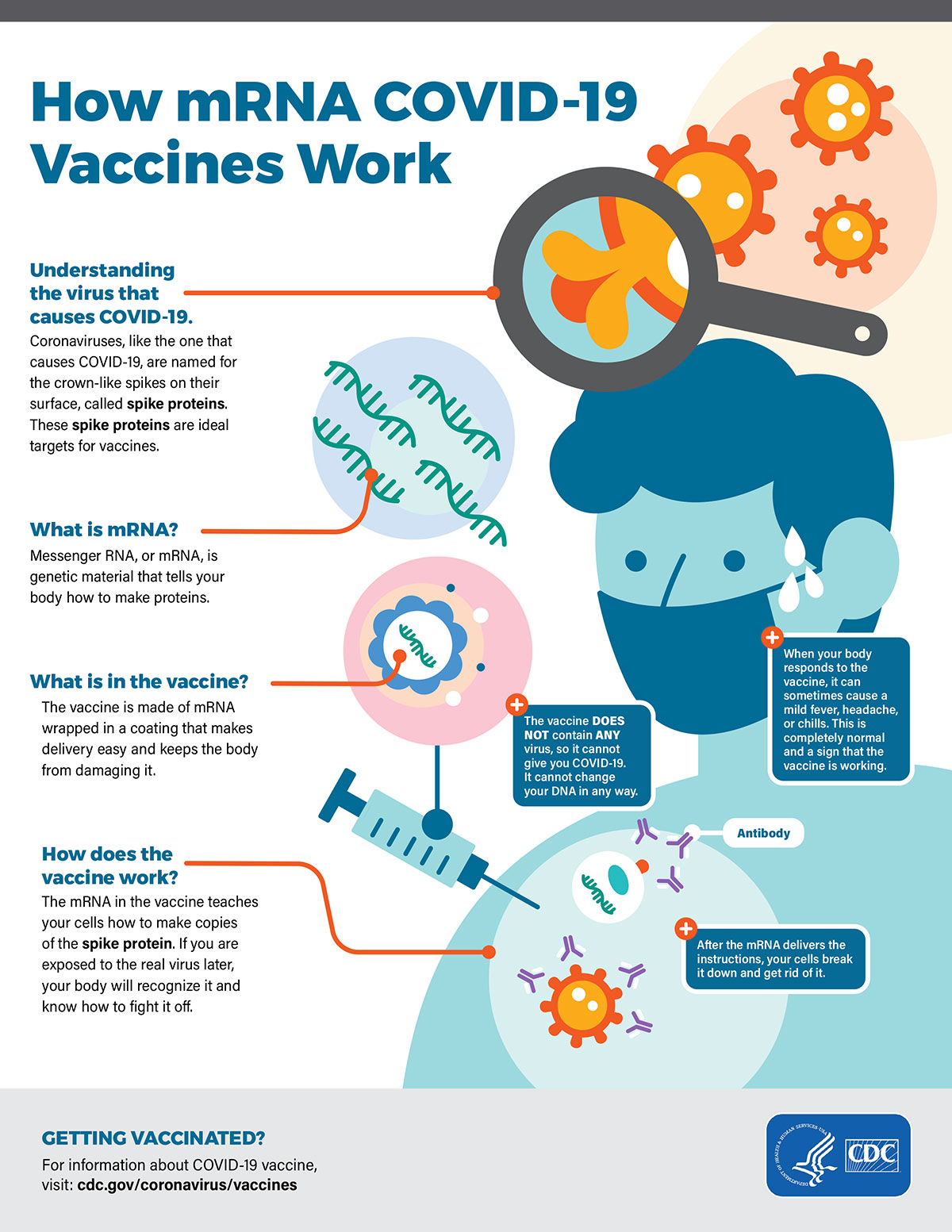
When cases of a new contagious disease caused by a new type of coronavirus appeared in 2019, scientists applied recent scientific advances to develop vaccines in a very short time. The coronavirus is named “corona” (for “crown”) because it has “spikes” like a crown. The “spikes” enable the virus to attack healthy cells. These spikes were crucial to the development of vaccines against the coronavirus.
The Moderna and Pfizer-BioNTech vaccines for COVID-19 are called “mRNA vaccines” because they use lab-created messenger RNA (mRNA). This mRNA is genetic material that instructs people’s bodies to make proteins which are the same protein as in the “spike” that surrounds the coronavirus. The body then learns to recognize the “spike,” and therefore produces antibodies to fight the coronavirus.2 An important part of the reason that scientists were able to develop the COVID-19 vaccine so quickly—in less than a year—is because research into developing vaccines for two other corona viruses, SARS and MERS, laid a basis for the mRNA vaccine for COVID-19.3
The side effects some people experience from the first or second shot of vaccines, which are mild in the overwhelming number of cases, are the impact of those antibodies being activated.
What is the science underlying these vaccines?
The foundation of the science behind the vaccines is the science of evolution. This is the most tested theory in all of science,4 and it shows how all of life developed over billions of years, how all the species and forms of life developed. It is not possible to understand the human body, the immune system, or the way disease pathogens develop without being grounded in evolution.5
We cannot go into the science of evolution in depth here, but strongly recommend The Science of Evolution and the Myth of Creationism, Knowing What’s Real and Why It Matters, by Ardea Skybreak.6 The Science of Evolution has a section addressing the ways that evolution was essential for scientists being able to develop a response to the SARS epidemic—and, this applies as well to COVID-19. (This is in a box alongside this article.)

A big part of the challenge of combatting infectious diseases is that the pathogen, the virus in the case of COVID-19, evolves and continues to develop new forms (mutations) (like the Delta variant) which can be resistant to vaccines or, as in the case of the Delta variant, can be more contagious. What evolution points to is that the emergence of new forms is not a product of a conspiracy coming out of a government lab, as some of the disinformation/misinformation out there claims, but is in fact the way that all life develops. New generations emerge which are descended from the previous one but which contain random differences, variations, and this provides a basis for new types of organisms to emerge in unpredictable ways. This happens all the time, in every species.
This science takes us to very clear conclusions—if someone doesn’t get vaccinated, they are much more likely to get infected, and they will both spread the virus to others, and their body will become an “incubator,” a place where germs will mutate and this could lead to the emergence of a more dangerous variant. This is an assessment based on a solid, evidence-based understanding. The larger the pool of people who are not vaccinated, who are “incubators” in this way, the greater the threat that even worse variants will emerge, and the greater the danger to society overall.7 If the vast majority of people in society DO get vaccinated, this protects the individuals who are vaccinated, the people they encounter in their lives, and it makes it much less likely that new and dangerous variants of the disease will emerge.8

Medical personnel check the temperature of COVID-19 patient in Baton Rouge, August 2, 2021. Louisiana leads the nation in new Covid cases per capita, and remains with the bottom five states administering vaccines. Photo: AP
Isn’t the process of the testing and distribution of the vaccines “corrupt” and something “we” cannot “trust”?
Given the global pandemic and threats posed by COVD-19, the most basic point here is that there actually has been a scientific, evidence-based process not only of developing these new vaccines in a short time, but also of testing whether they worked, and whether they had harmful side effects. These tests were conducted in a scientific way, and some of the vaccines met the challenge. This was done fast, because of the urgent need in the middle of the global pandemic, with basic public health standards being maintained.9
This process of testing the vaccines has itself been studied and reported on by scientists using methods that are scientific and the testing of the vaccines holds up.10

Queensland University lab technicians work on coronavirus vaccine, January 5, 2020.
For one example, Lancet, a highly-respected British medical journal reported on May 1, 2021, that the Pfizer-BioNTech (BNT162b2) vaccine—approved for use in the U.S.—had “shown excellent safety and efficacy in phase 3 trials.” (Phase 3 trials are large scale and longer-term studies that all new drugs are required to go through. These are more thorough than the original studies that led to Emergency Use Approval for COVID-19 vaccines in the U.S.).11
And a February, 2021 article in the New England Journal of Medicine reported on a study of the Moderna vaccine (approved for use in the U.S.) involving over 30,000 volunteers and concluded the “vaccine showed 94.1% efficacy at preventing Covid-19 illness, including severe disease. Aside from transient [very short term] local and systemic reactions, no safety concerns were identified.”12
An important thing to note is that while Trump did try to turn the scientific and medical arms of the U.S. government into instruments of his fascist politics, and he did some real damage, he did not fundamentally succeed. Organizations like the Centers for Disease Control (CDC) and the Food and Drug Administration (FDA), which have had important responsibility for the COVID-19 vaccines, are both part of the capitalist system, and at the same time, are scientific bodies. We have cited some things from their websites here because there are important truths that people can learn from them.
In conclusion:
Everyone who is eligible should get the vaccination, and urge others to do the same.
1. https://www.who.int/news-room/feature-stories/detail/how-do-vaccines-work [back]
2. See How mNRA Vaccines Work at the CDC website. [back]
3. The lightning-fast quest for COVID vaccines—and what it means for other diseases, Phillip Ball. Nature, December 18, 2020 [back]
4. The Science of Evolution, p. 34-35:
In addition, like any good scientific theory, the theory of evolution is open to challenge and to being falsified or proven wrong. What does this mean? It means that when scientists have a theory about something, they make predictions about how, if the theory is TRUE, then it should be possible to find such and such evidence. But they also indicate what kinds of evidence would be incompatible with the theory and would prove the theory to be FALSE. The amazing thing about the theory of evolution is that in the more than 140 years since Darwin published his major breakthrough theory, thousands of scientists from all over the world have been able to collect literally tons of evidence of different sorts which is compatible with and demonstrates the truth of evolution theory, but no one—not a single person anywhere—has been able to come up with a single shred of concrete scientific evidence (of the kind that serious scientists can go out and verify for themselves) that would show the theory of evolution to be false. And that, my friends, should also tell you something. Especially since (as many other people have pointed out) anyone who could somehow manage to prove the theory of evolution to be false would become an overnight celebrity for having been able to overturn one of the most solidly held facts in all of science! [back]
5. In basic terms, evolution is descent with modification. Life forms reproduce, and the next “generation” both inherits a basic form, and at the same time, there is variation within that among different individuals—no two individuals are the same. And some individuals thrive and reproduce in the environment they find themselves in, while others don’t. Through this process, over many generations, whole new species, new kinds of organisms, come into being. This is how all life has developed, from very simple single-celled organisms which emerged 3.5 billion years ago, to all of the diversity we now see today.”
Skybreak, The Science of Evolution (p. 8):
But, at any rate, there is plenty of evidence that all the life-forms which are around on earth today—all the bacteria, all the species of plants, all the species of animals, including humans—are descended from a single common ancestor. One of the most important indicators of this “common descent” is that all living things on this planet make use of the same basic underlying genetic code and share many particular mechanisms of protein synthesis. [back]
6. A major theme of The Science of Evolution is to expose and oppose the lies and deceitful methods of the hard-core Christian fundamentalist opponents of evolution. These people are the core of the social base of Trump, they number in the millions, and a big majority of them are also refusing to take the COVID-19 vaccine. There is a deep linkage between opposing evolution and rejecting medical science about the vaccine. [back]
7. In this obscenely unequal world, where some countries have more vaccines than they need, and other countries have hardly any vaccines at all, there is a grave danger of whole sections of the world becoming “incubators” because of these unjust, and completely unnecessary, inequalities. [back]
8. The science is clear that taking the vaccine strongly benefits society as a whole. But we are in a society where there is a deeply entrenched fascist movement which elevates individualism in even more extreme ways than American “me first” culture has done for generations. This individualism is the foundation for a morality which sacrifices the more vulnerable to the epidemic, and mocks and opposes even easy things which should be done for the common good like wearing masks and getting vaccinations. [back]
9. We are not saying here that there were no problems in vaccine development. In the dog fight between different capitalists which characterizes capitalism, and which shaped a massive competition between corporations and nations to develop and sell vaccines (and which is still going on), there were vaccines which failed, and others which had problems at times for various reasons, and not all vaccines are the same. But it is clear that overall, people SHOULD take the COVID-19 vaccines. [back]
10. Science is a method to understand actual objective reality. There is an assault on science coming from two sides which is very intense in society right now. On the one side, the fascists hate science and attack its methods and all its results that do not serve their immediate purposes (when it comes to making more powerful weapons of destruction, the fascists are all for science!) On the other side, you have the “woke folk insanity,” an approach that denies science and tears down everything that does not conform to the latest arbitrary standards of “wokeness.” Here is an important distillation by Ardea Skybreak on what science is:
So I think it might be worth starting a little bit by talking about what is science, to demystify it a little bit. I mean, science deals with material reality, and you could say that all of nature and all of human society is the province of science, science can deal with all that. It’s a tool–science–a very powerful tool. It’s a method and approach for being able to tell what’s true, what corresponds to reality as it really is. In that sense, science is very different than religion or mysticism, or things like that, which try to explain reality by invoking imaginary forces and which provide no actual evidence for any of their analyses. By contrast, science requires proof. It requires evidence. It is an evidence-based process. That’s very important. Science is an evidence-based process. So whether you’re just trying to understand something in the world, or trying to figure out how to change reality–for instance, you might be trying to cure a disease, or you might be trying to understand the dynamics of a rain forest or a coral reef ecosystem, or you might be trying to make a revolution to emancipate humanity, you know, the full range of material experience–science allows you to figure out what’s really going on and how it can change.
From SCIENCE AND REVOLUTION, On the Importance of Science and the Application of Science to Society, the New Synthesis of Communism and the Leadership of Bob Avakian by Ardea Skybreak, p. 2 [back]
11. See “Vaccine side-effects and SARS-CoV-2 infection after vaccination in users of the COVID Symptom Study app in the UK: a prospective observational study,” The Lancet, July, 2021 [back]
12. See “Efficacy and Safety of the mRNA-1273 SARS-CoV-2 Vaccine,” The New England Journal of Medicine, December 30, 2020 [back]
From The Science of Evolution and the Myth of Creationism:
Evolution Science and the SARS Virus
It is simply the case that no one can come to understand anything essential about the SARS virus and epidemic (and how best to deal with it) without factoring in some basic facts about biological evolution. The basic principles of biological evolution are, first of all, helping to identify the genetic structure of this particular virus, and to uncover what other viruses the SARS virus is related to (the evolutionary family of closely related “corona viruses”). This evolutionary knowledge in turn is important for trying to figure out which medications and/or vaccines might or might not have an effect on the SARS virus (for instance, if it’s in the evolutionary family of corona viruses, it makes sense to look first at what we already know does or doesn’t work against other closely related viruses in the same corona family). Then there’s the question of trying to figure out where this particular SARS virus came from: understanding evolutionary principles has helped us to understand that viruses can sometimes “jump” from one biological species to another (often, it seems, through predation, when one species eats another species). Understanding how evolution works also helps us to realize that members of a species which have eaten virus-infected members of a different species are much less likely to get sick themselves if the two species in question are only distantly related than if they are more closely related. (Among other things, this is one of the reasons it’s really not a very good idea for human beings, who are primates, to eat other primates, such as monkeys and apes; there continues to be speculation, for instance, that the rapidly mutating strains of the HIV virus that causes AIDS in humans originally evolved out of some closely related viruses which have been found to cause an AIDS-like disease in some African primates. A number of biologists suspect some of these viruses may at some point have “jumped” to human hosts through the consumption of “bush meat”—including various species of monkeys as well as apes, such as chimpanzees—which is an ongoing practice in the region.)
Disease organisms themselves evolve over time and often in conjunction with (together with or in relation to the evolution of) their hosts. The more recently two species shared a common ancestor in the evolutionary past (and the more bodily features they still have in common) the more likely it is that some of the factors that can sicken one (such as a particular virus) can also sicken the other. The theory of evolution allows us to understand such things, and this understanding in turn can give us clues about where to look next to try to figure something out. People who reject evolution, and who believe that all living species of plants and animals are completely unrelated to each other, can’t make any real significant breakthroughs in the modern-day struggle to manage or cure infectious diseases. Only people solidly grounded in evolution science can do that. For instance, it is only because they understood and were taking into account some of the basic principles of biological evolution that epidemiologists (biologists who study infectious diseases and their spread and containment) even knew to go looking for the possible source and reservoirs of the SARS virus in non-human species which shared common evolutionary ancestors with humans in the not too distant evolutionary past. Humans are mammals, and researchers have therefore paid particular attention to some of the other mammals that humans come into contact with in areas with a high original incidence of SARS (both domestic mammals, such as pigs, which sometimes live with humans at close quarters, or wild mammals which are hunted and consumed by humans). They have been looking for SARS viruses in areas of rural China where, some scientists think, the virus could have “jumped” from pig to human. And, as I write this, the latest news is that a species of wild civet (a cat-like mammal which is apparently occasionally hunted and consumed by people in the region) may harbor the SARS virus and represent the pathway through which humans initially contracted the disease. It is too early to tell for sure. But whether or not this particular source turns out to be the right one, the point is that trying to figure out where this virus came from is an important part of trying to figure out how to treat it and contain it in human populations—but scientists wouldn’t even know where to look for it if they didn’t understand some basic facts about evolution, including why it is that disease-causing factors can sometimes jump between prey and predator species and sicken the predators, especially if they still share many evolutionary features in common with their prey.
The SARS virus, human susceptibility to the brain-wasting “mad-cow disease,” the rapidly evolving AIDS virus, the increasingly problematic evolution of bacteria resistant to all known antibiotics—all these are serious public health problems, and they cannot be fully understood and correctly addressed unless one takes into account the past and present evolution of these disease-causing agents.
Get a free email subscription to revcom.us: